Subsea Positioning
Cost effective ROV positioning systems enabling explorers, researchers, and search & recovery around the world.


Subsea Positioning Family
The Cerulean subsea positioning products include the Tracker 650 DVL, the ROV Locator USBL components, and the flagship Omnitrack USBL system. All products are fully supported with the Cerulean SonarView application.
Omnitrack and ROVL families differ in that Omnitrack is a full top side assembly with GNSS compass ready to deploy. ROVL is a lower cost solution for applications where magnetic compass calibration is not an issue and heading accuracy is not as important.
Tracker 650 DVL can be used independently or as a supplement to a USBL system to provide high update rate velocity information for smooth seamless tracking of your ROV subsea position.


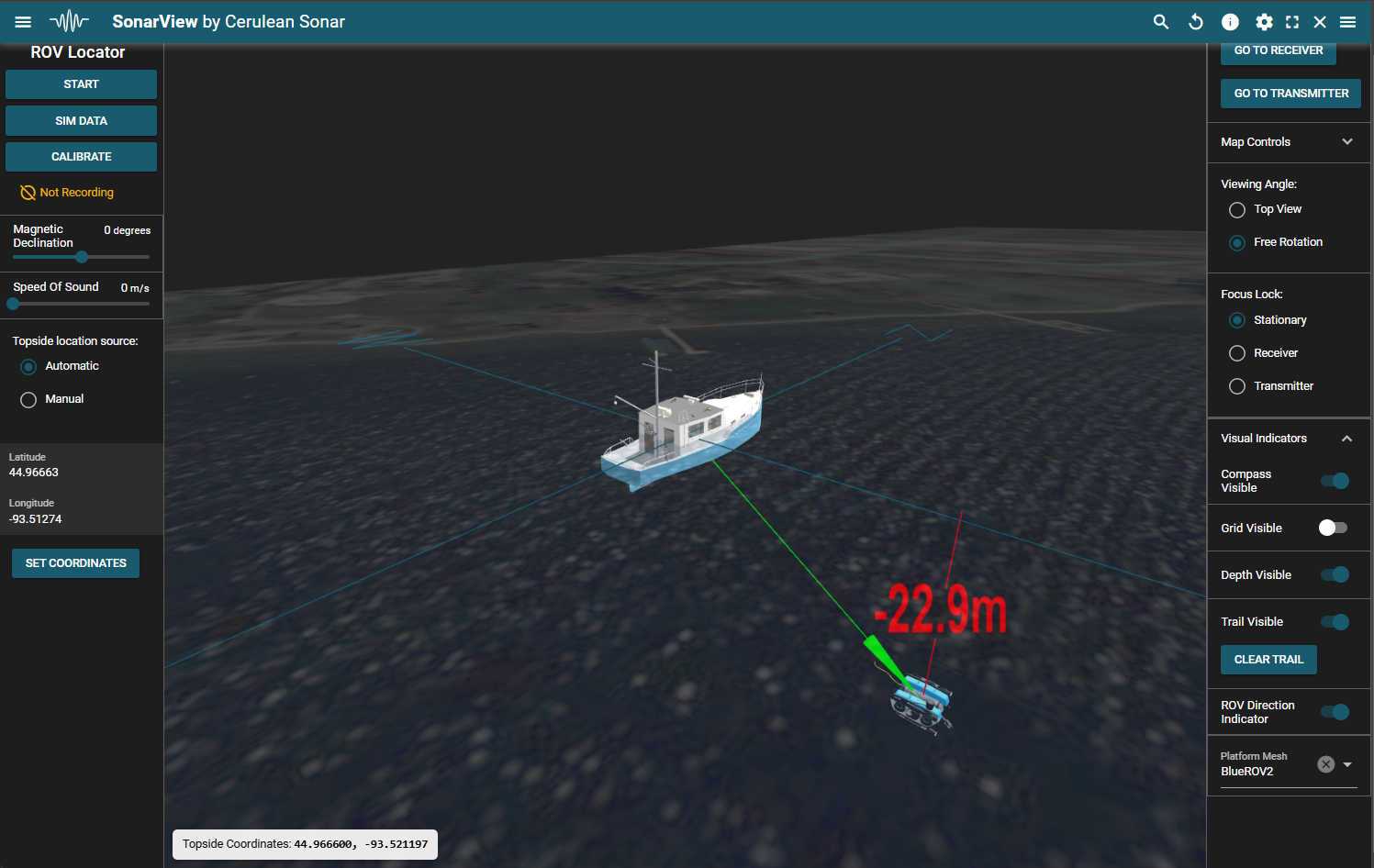
SonarView
All Cerulean Subsea Positioning products are now supported with full SonarView integration!