
Omniscan 450 SS – 300m rated
$2,590.00
SKU:
The Omniscan 450SS is tailored for side-scan applications. It has a longer transducer which gives 50% better angular resolution and 150m maximum range.
For scanning both sides simultaneously, order quantity 2. SonarView integrates both devices together as if they were a single system.
Description
As the ROV or surface vessel moves, SonarView “paints” the image of the scanned area of the sea floor giving excellent situational awareness in the murkiest conditions.
In the case of a surface vessel with GPS or an ROV with DVL, scanning is translational as well as rotational. A key feature of the Omniscan 450 is its integration via SonarView with the vehicle’s MAVLINK data stream. Using the vehicle’s attitude and location information, SonarView displays each ping in its correct absolute orientation and position.
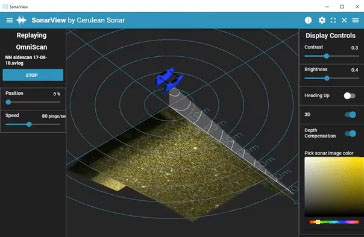
SonarView screen capture showing 3D view of sonar data being “painted” on the sea floor. This is not a simulation. It is screen capture of SonarView replaying an actual Omniscan log file.

Omniscan 450SS mounted on a Blue Robotics BlueBoat
IMPORTANT: For the BlueBoat, you must procure from Blue Robotics BR-102295 – Omniscan 450SS BB120 Integration Kit (which includes the mounting brackets.)
Side Scanning
The Omniscan 450SS transducer is rated to 300m operating depth. Two units of the Omniscan 450SS can be combined in SonarView for the conventional side-scan application in which both sides are scanned simultaneously.
The electronics module must be mounted in the vehicle’s water tight enclosure.
What’s in the Box
Omniscan 450SS with Ethernet + Power Wiring Cable
Blue Robotics RJ45 to JST GH Adapter
Specifications
| Frequency | 450 kHz |
|---|---|
| Range Resolution | Up to 1/1200 of range setting |
| Maximum Ping Rate | 20 pings per second up to 30m range, thereafter limited by range and speed of sound. Examples: 10 pps @ 50m, 5 pps @ 140m range setting |
| Power Supply | 10-30 Volts, 5 watts max at idle, 10 watts max while pinging |
| Data Interface | 100BaseT Ethernet |
| Electrical Connection | Single cable with 4 pin JST for data (Blue Robotics Ethernet standard), plus a wire pair for power. Adapter provided for standard RJ-45 ethernet connection. |
| Maximum Range | 150m |
| Far Field (Note 1) | See (Note 1) below. |
| Beam Width (Note 2) | 0.5° |
| Beam Height | 50° |
| Maximum Operating Depth | 300m |
| Weight in Air | 180g (Transducer only) |
| Weight in Water | -10g (Transducer only) |
| Overall Dimensions | 318x30x20mm |
Note 1: Far Field distance is the range beyond which the beam width specification is valid. At nearer distances the effective beam width gets wider, and sidelobes get larger.
Note 2: This is the nominal theoretical 2-way (transmit and receive) 3dB beam width.


