
Omniscan 450 FS – 100m rated
$2,490.00
SKU:
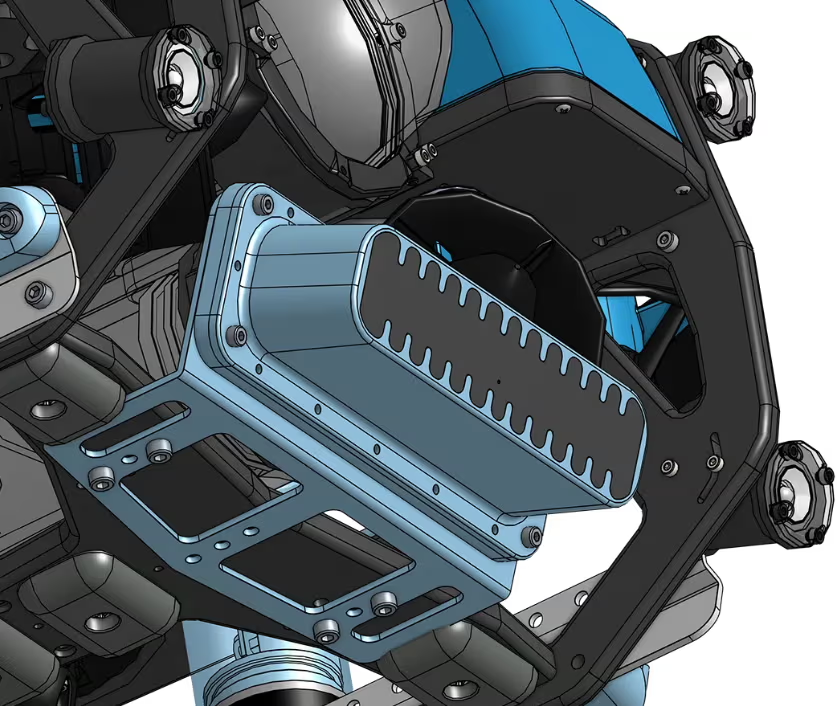
The Omniscan 450FS is ideally suited for forward looking ROV applications. The transducer and electronics are housed in a single enclosure with Ethernet + power interface. 100m depth rating.
Intuitive Operator Control
Traditional imaging sonars rely on mechanical scanning to generate an image of the seafloor. The Omniscan 450 FS Imaging Sonar takes a completely different approach—it puts scanning in the hands of the ROV pilot.
Instead of waiting for a mechanical scanner to slowly sweep an area, the Omniscan 450 FS builds an image dynamically as the ROV moves. This means you can instantly focus on specific areas of interest. Cerulean’s SonarView software “paints” the image in real-time, giving pilots complete control over where and how they scan.
The result is excellent situational awareness in the murkiest conditions.
Performance
The Omniscan 450 FS offers a 120 meter range, allowing you to detect targets at these distances regardless of visibility. Its 50 degree vertical beam height ensures you can see objects far forward as well as below the ROV, even when operating high off the seafloor.
The Omniscan 450 FS helps you easily locate and approach targets, making it ideal for wreck hunting and navigation. It reveals details that other imaging sonars might overlook, and can assist in locating objects that are difficult to detect. Image quality is superior to multibeam forward looking sonars costing 10x more.
Doppler Mode
For ROVs without DVL motion information, Omniscan’s Dopper Position Tracking can be used for translational information along the direction of the beam. Using a pair of Omniscan 450 FS units, one forward and one 90 degrees to either side, full 2d motion tracking is available. This also enables position hold mode with appropriate integration.
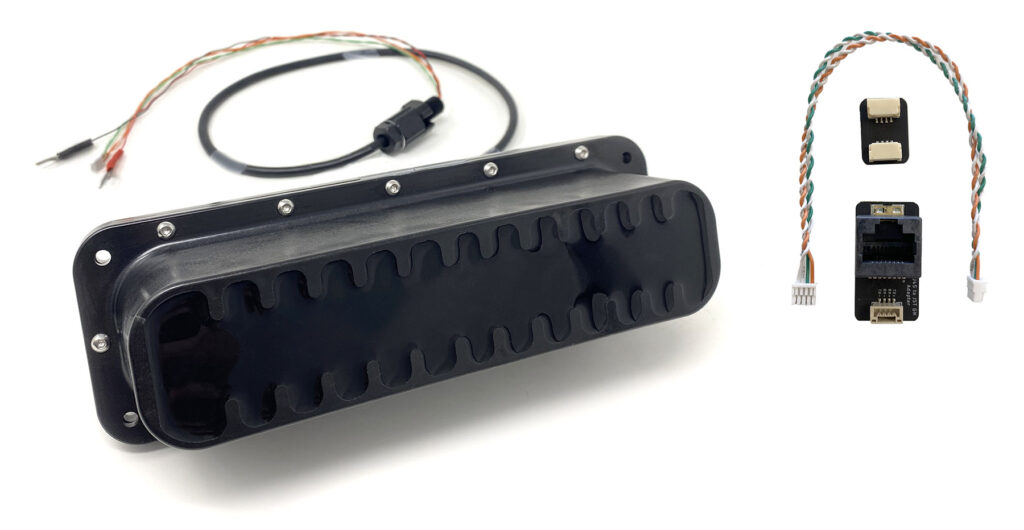
What’s in the Box
Omniscan 450FS with Ethernet + Power Wiring Cable
Blue Robotics RJ45 to JST GH Adapter
Specifications
| Viewing Software | SonarView by Cerulean |
|---|---|
| Frequency | 450 kHz |
| Range Resolution | Up to 1/1200 of range setting |
| Maximum Ping Range | 20 pings per second up to 30m range, thereafter limited by range and speed of sound. Examples: 10 pps @ 50m, 5 pps @ 140m range setting |
| Power Supply | 10-30 Volts, 5 watts max at idle, 10 watts max while pinging |
| Data Interface | 100BaseT Ethernet |
| Typical Usable Range | 100m |
| Electrical Connection | Single cable with four-pin JST for data (Blue Robotics Ethernet standard), plus a wire pair for power. An adapter is provided for a standard RJ-45 ethernet connection |
| Maximum Range | 100m |
| Far Field (Note 1) | 5m |
| Beam Width (Note 2) | 0.8° |
| Beam Height | 50° |
| Maximum Operating Depth | 100m and 300m versions |
| Weight in Air | 440g(100m), 825g(300m) |
| Weight in Water | -60g(100m), +325(300m) |
| Overall Dimmensions | 55x67x200mm |
Note 1: Far Field distance is the range beyond which the beam width specification is valid. At nearer distances, the effective beam width gets wider, and sidelobes get larger. Note 2: This is the nominal theoretical 2-way (transmit and receive) 3dB beam width.



